




Продукция
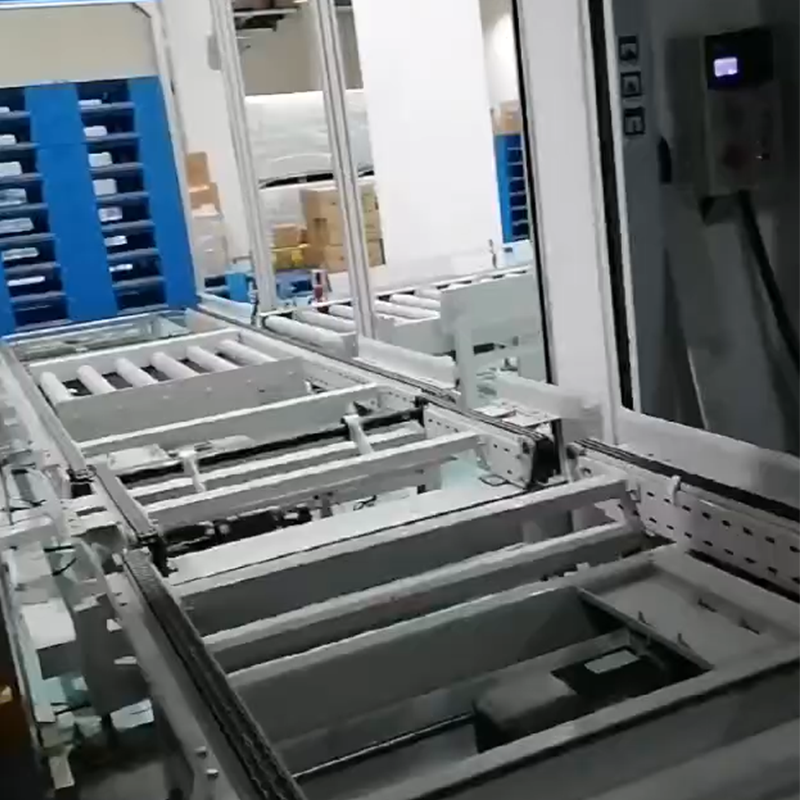



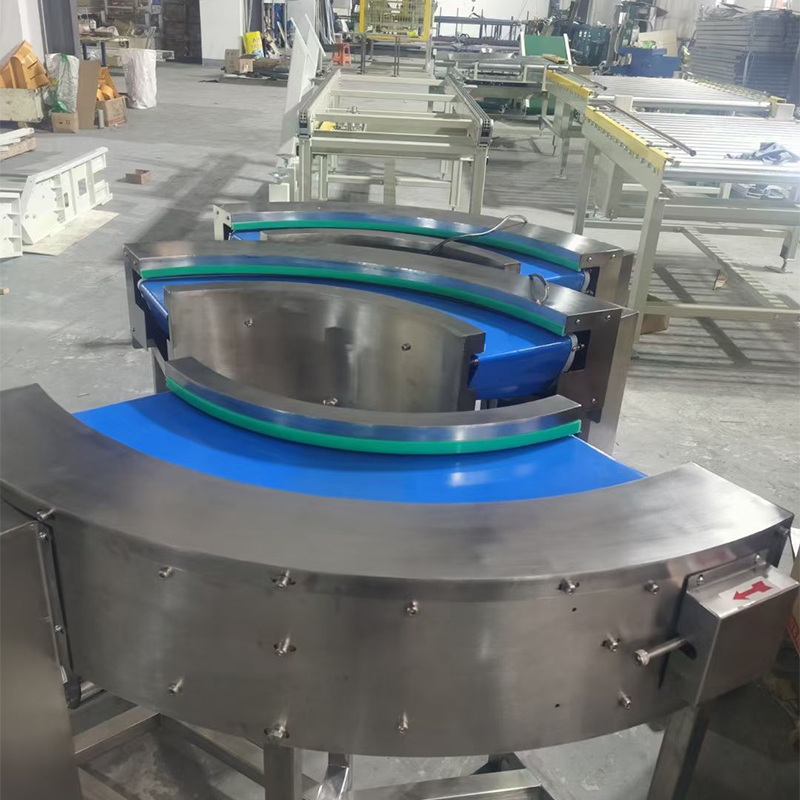










Пластинчатый цепной конвейер с шариковыми вставками
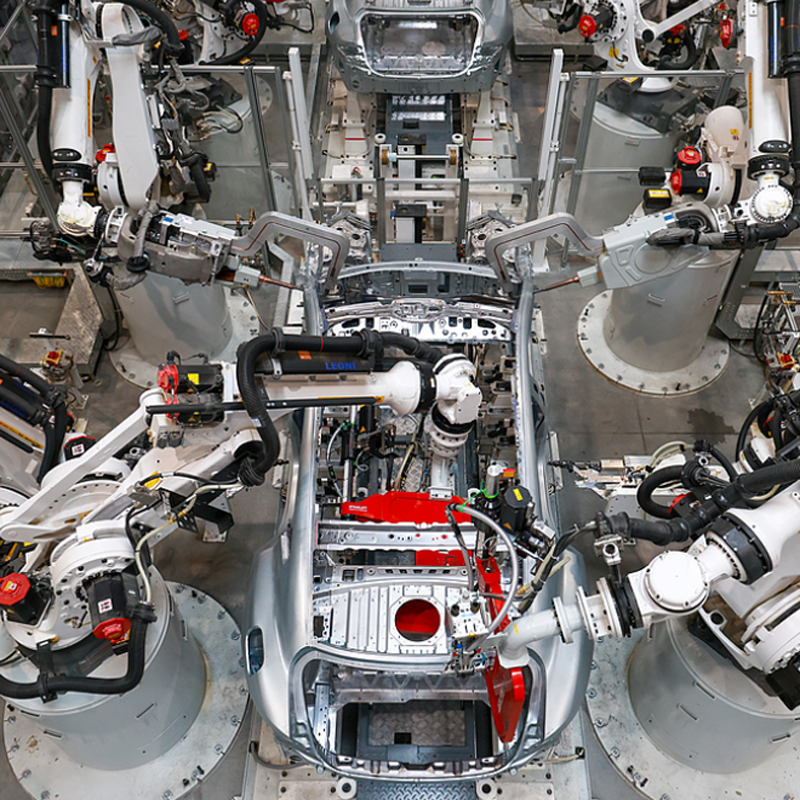
Стандартная рука промышленного робота обычно состоит из четырёх основных частей: механической конструкции, приводной системы, системы управления и датчиков. Количество шарниров (то есть степеней свободы) определяет её гибкость – чем больше степеней свободы, тем сложнее движения и тем выше...
Описание
маркер
Стандартная рука промышленного робота обычно состоит из четырёх основных частей: механической конструкции, приводной системы, системы управления и датчиков. Количество шарниров (то есть степеней свободы) определяет её гибкость — чем больше степеней свободы, тем сложнее движения и тем выше универсальность.
Несколько распространённых типов имеют свои сильные стороны:
1.Многозвенный робот: обычно имеет 6 шарнирных осей и является самым распространённым типом промышленных роботов. Он обладает большим рабочим диапазоном и гибкими движениями, способен выполнять практически любые сложные задачи.
2.SCARA-робот: имеет горизонтальную многозвенную конструкцию, обычно с 4 осями. Он отличается высокой скоростью и точностью, особенно подходит для быстрой сортировки, сборки и перемещения в плоскости, широко применяется в электронной промышленности.
3.Рука промышленного робота с декартовой системой координат: движется по трём линейным осям X, Y, Z, имеет простую конструкцию и относительно низкую стоимость, обычно используется в сценариях с фиксированной траекторией, таких как загрузка и разгрузка станков и простая транспортировка.
Основные области применения и типичные сценарии
Сценарии применения рук промышленных роботов чрезвычайно широки и охватывают практически все звенья современного производства:
1.Сварка: это одно из самых зрелых применений рук промышленных роботов, широко используется в автомобилестроении, авиационно-космической промышленности и других областях. Они способны выполнять такие процессы, как точечная сварка и дуговая сварка, обеспечивая стабильность и прочность сварных точек, а также стабильно работая в условиях высокой температуры и запылённости.
2.Транспортировка и паллетирование: в логистике, складском хозяйстве и на производственных линиях руки промышленных роботов могут заменить ручной труд при выполнении повторяющихся операций по транспортировке, загрузке-разгрузке и паллетированию материалов, значительно снижая трудоёмкость и повышая эффективность.
3.Прецизионная сборка: в электронной, автомобильной и других отраслях руки промышленных роботов с помощью датчиков технического зрения и силомоментных датчиков способны выполнять такие прецизионные операции на субмиллиметровом уровне, как установка чипов и сборка компонентов.
4.Нанесение покрытий и окраска: руки промышленных роботов способны точно планировать траекторию, обеспечивая равномерность покрытия и одновременно удаляя работников из вредной среды окрасочного производства.
5.Контроль качества: благодаря интеграции промышленных камер и алгоритмов технического зрения руки промышленных роботов могут автоматически выполнять внешний осмотр, измерение размеров и обнаружение дефектов продукции, что более эффективно и надёжно по сравнению с ручным визуальным контролем.
")
")
")
связаться с нами
Сопутствующие популярные продукты

Стандартный ленточный конвейер
Основные характеристики 1.Простая конструкция и высокая универсальность: сама по себе конструкция...

Лёгкий ленточный конвейер
Основные характеристики 1.Лёгкая нагрузка и низкая скорость: разработан для транспортировки матер...

Лёгкий пластинчатый цепной конвейер
Основные характеристики 1.Лёгкая конструкция и гибкая компоновка: лёгкий пластинчатый цепной конв...

Стандартная тележка RGV
RGV, полное название — рельсовое управляемое транспортное средство. Преимущества: фиксиров...

Перегрузочное устройство
Автоматизированный склад с адресным хранением: соединение вертикальных и горизонтальных транспорт...

Наклонный пластинчатый цепной конвейер
Основные характеристики 1.Противоскользящая конструкция и транспортировка под большим углом накло...

Наклонный ленточный конвейер
Основные характеристики и технические ключевые моменты 1.Противоскольжение является ключевым факт...

Возвратно-поступательный подъёмник
Основные области применения Его ценность заключается в открытии вертикальных логистических канало...

Сварочная рука промышленного робота
Сварочная рука промышленного робота — это промышленный робот, специально предназначенный для авто...

AGV с грузовой платформой
AGV с грузовой платформой — это автоматически управляемое транспортное средство, которое перевози...
Пластинчатый цепной конвейер с сетчатой лентой
Пластинчатая цепь обеспечивает прочную и ровную несущую поверхность и в большей степени ориентиро...