




Продукция












Паллетирующая рука промышленного робота
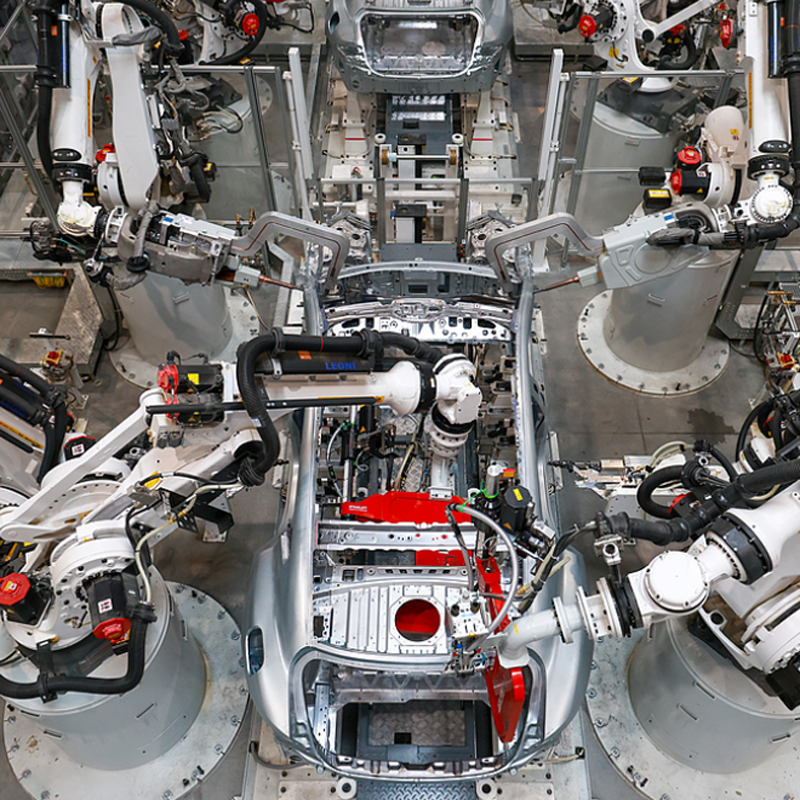
Паллетирующая рука промышленного робота – это промышленный робот, специально предназначенный для автоматизированного штабелирования и перемещения грузов. Его можно представить как неутомимого «супер-грузчика», который по заданным правилам аккуратно и точно укладывает коробки, мешки, бочк...
Описание
маркер
Паллетирующая рука промышленного робота — это промышленный робот, специально предназначенный для автоматизированного штабелирования и перемещения грузов. Его можно представить как неутомимого «супер-грузчика», который по заданным правилам аккуратно и точно укладывает коробки, мешки, бочки и другие предметы различной формы на паллеты или в заданные места.
Его основная ценность заключается в освобождении человека от тяжёлого, повторяющегося и подверженного ошибкам физического труда и обеспечении непрерывной, стандартизированной работы 24 часа в сутки. Производительность одной паллетирующей руки промышленного робота обычно эквивалентна труду 4–6 квалифицированных рабочих.
Основные компоненты и принцип работы
Полноценная система паллетирования функционирует благодаря слаженной работе нескольких частей, подобно единой команде:
1.Корпус руки промышленного робота («рука»): отвечает за выполнение операций по перемещению и штабелированию. Наиболее распространены многозвенные роботы с большим рабочим диапазоном и высокой гибкостью, а также SCARA-роботы, отличающиеся высокой скоростью и точностью в плоскости. Для тяжёлых материалов применяются роботы с декартовой системой координат или портальные роботы, обладающие простой конструкцией и высокой несущей способностью.
2.Концевой эффектор («кисть»): это элемент, непосредственно контактирующий с грузом, который гибко заменяется в зависимости от типа груза. Например, для перемещения картонных коробок используются зажимные пластины, для мешков — захваты, для гладких поверхностей (таких как стекло, электронные компоненты) — вакуумные присоски.
3.Система управления («мозг»): с помощью предустановленных программ управляет траекторией движения, скоростью и силой захвата руки промышленного робота. В последние годы внедрение алгоритмов искусственного интеллекта и систем 3D-технического зрения наделило её «глазами» и «мозгом», позволив в реальном времени воспринимать грузы разного размера и хаотичного расположения, осуществлять неупорядоченный захват и интеллектуальное паллетирование.
Основные области применения
Благодаря высокой эффективности, точности и гибкости применение паллетирующих рук промышленных роботов охватывает практически все промышленные и логистические сценарии, где требуется обработка упакованных грузов:
1.Логистика и складское хозяйство: в центрах электронной коммерции и экспресс-доставки быстро сортируют и паллетируют посылки, что позволяет повысить использование складского пространства на 30%–50%, а эффективность обработки увеличить в 2–3 раза. Кроме того, они способны после интеллектуального распознавания хаотично расположенных грузов аккуратно укладывать их, достигая производительности около 1300 единиц в час.
2.Пищевая промышленность и производство напитков: высокоскоростная и гигиеничная укладка ящиков с напитками, пищевой упаковки и т.д., позволяющая избежать повреждений при ручной транспортировке. На линии розлива пива эффективность может достигать 24 ящиков в минуту.
3.Химическая промышленность и производство строительных материалов: заменяет ручной труд при перемещении и штабелировании мешков с цементом, бочек с химическим сырьём весом 50 кг и более, защищая работников от вредных условий труда.
4.Обрабатывающая промышленность: в автомобильной, электронной и других отраслях применяется для прецизионного паллетирования и перемещения деталей и компонентов. Например, в табачной промышленности руки промышленных роботов уже способны гибко выполнять смешанное паллетирование стандартных и нестандартных пачек сигарет по всему ассортименту.
При выборе модели, помимо стоимости, ключевым является оценка веса груза (несущая способность), размеров (рабочий диапазон) и производственного такта (скорость). Для гибких производственных линий с многономенклатурным и мелкосерийным выпуском можно в первую очередь рассматривать модели с более низкой стоимостью развёртывания и поддержкой взаимодействия человека и робота.
")
")
связаться с нами
Сопутствующие популярные продукты
Приводной роликовый конвейер с круглым ремнём
Принцип работы и основная конструкция 1.Способ передачи: двигатель вырабатывает мощность и переда...

Лёгкий пластинчатый цепной конвейер
Основные характеристики 1.Лёгкая конструкция и гибкая компоновка: лёгкий пластинчатый цепной конв...

Рольганг с поликлиновыми ремнями
Рольганг с поликлиновыми ремнями — это приводное роликовое транспортировочное оборудование, испол...

Тяжёлая тележка RGV
Тяжёлый RGV (рельсовое управляемое транспортное средство) — это рельсовое автоматизированное тран...

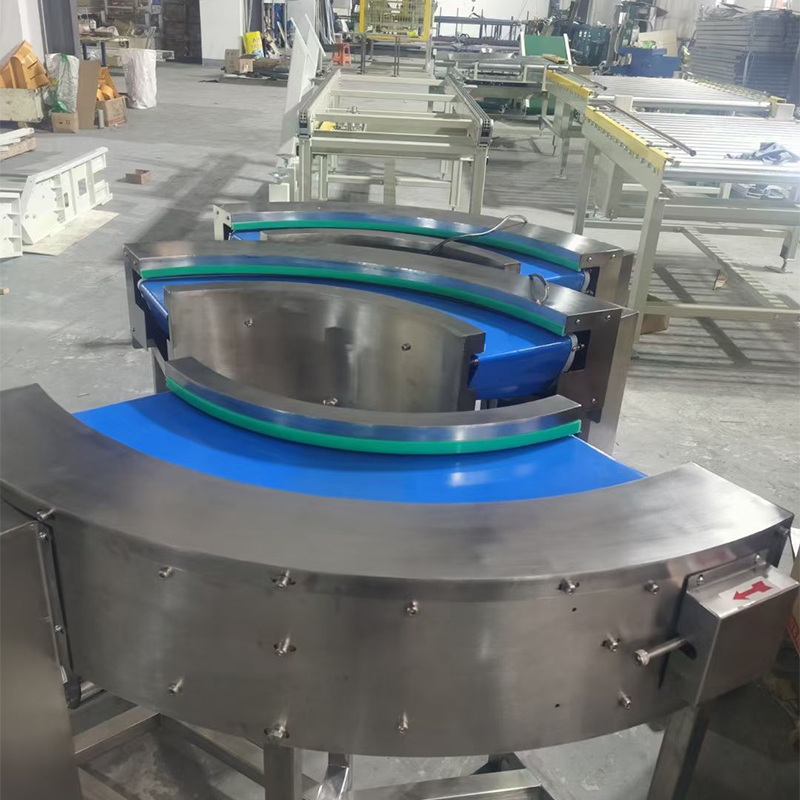
Поворотный роликовый конвейер
Основные области применения и сценарии использования Поворотный роликовый конвейер является неотъ...

Наклонный пластинчатый цепной конвейер
Основные характеристики 1.Противоскользящая конструкция и транспортировка под большим углом накло...

Лёгкий рольганг с фрикционными ремнями
Лёгкий рольганг с фрикционными ремнями — это транспортировочное оборудование, в котором все ролик...

Многоручьевой узколенточный конвейер
Основные характеристики и принцип работы 1.Многорядная параллельная компоновка и высокоэффективна...

Подъёмник для приёма грузов с рохлей
Преимущества и характеристики По сравнению с использованием вилочных погрузчиков или ручной транс...